








Aim:
The main aim of the project to develop an automated vehicle that can control bluetooth and find automatically road impairments.Accordingly, once a pothole is found, a dispensing mechanism is initiated in order to fill the road cavity with the appropriate repair material.
Abstract
Many factors, including weather conditions, temperature, and significantly heavy weights caused by vehicles can introduce flaws in the pavement. As a result, this creates several cracks or cavities in the roadway which could lead to damages to motor vehicles and an increase in the rate of road accidents. In this paper, we introduce a practical solution that includes an autonomous vehicle that locates and repairs potholes that are found on streets. The proposed system carries out several processes including detection, filling, and compacting processes. The proposed system also incorporates two software interfaces, one to be used by the user, and another one that is operated by the administrator. Potholes do not only cause damage to vehicle suspension systems but may, in severe cases, result in serious accidents and permanent injury. Year- round pothole repairs are also a major reason for the depletion of the country’s funds. Another major problem is the process of fixing these potholes. Problems within the fixing process include multiple constraints such as convenience, area, and time consumed. Therefore, the availability of an automated machine that can perform all the tasks in the process of fixing potholes would be much more convenient and practical. The main objective of the project at hand is to develop an automated vehicle that is capable of moving uniformly on the street to locate road impairments. Accordingly, once a pothole is found, a dispensing mechanism is initiated in order to fill the road cavity with the appropriate repair material.
Existing System:
Existing system is required more man power and all the materials are consist in separate vehicles and inspection for the road damages is done by the manual process and the it take more time more manpower .
Proposed System:
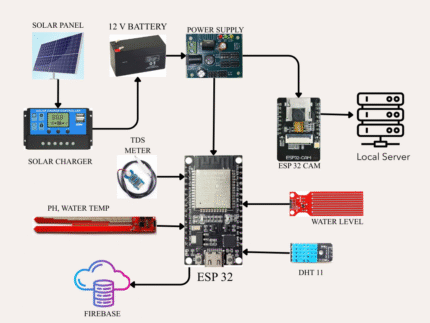
This proposed design uses a variety of sensors and actuators including IR sensor, Bluetooth, Esp 8266, water pump, a display, and a GPS tracker and motor-driver.the ultrasonic sensor detect the potholes and then automatically fill the road rework material and repair the road potholes automatically and same time send the location where is detect the potholes and working on the road .bluetooth is used to control the robot and cloud is used to sharing working status.








Reviews
There are no reviews yet.