








Aim:
The aim of this project is to develop an autonomous robot for monitoring hydroponic powerplants using line-following navigation and environmental sensors. The robot detects obstacles, identifies objects with an ESP32-CAM, and updates data to Firebase for real-time monitoring. It provides an efficient and sustainable solution for automating hydroponic farming operations.
Introduction:
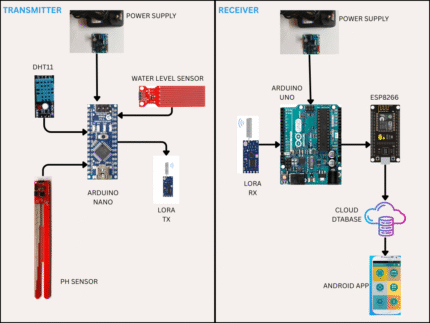
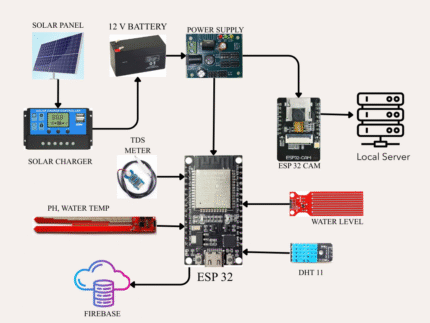
The Hydroponic Powerplant Monitoring Robot is an innovative solution designed to automate the monitoring and maintenance of hydroponic systems. Equipped with line-following capabilities using IR sensors, the robot navigates autonomously while tracking critical parameters like temperature, humidity, and soil moisture through integrated sensors. An ultrasonic sensor detects obstacles, and an ESP32-CAM identifies objects in its path, displaying results on a webpage via Firebase. Powered by a 12V battery, the robot ensures efficient and sustainable operations, reducing manual effort and enhancing productivity. With real-time cloud updates, it offers a smart, IoT-enabled approach to optimize and automate hydroponic farming processes.
Existing Method:
Traditional hydroponic system monitoring methods rely heavily on manual labor and static sensor installations, which often lack real-time adaptability and efficiency. Farmers manually check environmental parameters such as temperature, humidity, and nutrient levels, which can be time-consuming and prone to human error. Fixed sensors provide localized data but are limited in coverage and require multiple units to monitor large setups. Additionally, obstacle detection and plant health assessments rely on visual inspections, leading to delays in identifying and resolving issues. These methods are labor-intensive, inefficient for scaling, and do not leverage the potential of IoT or automation for real-time monitoring and control.
Proposed Method:
The proposed method introduces an autonomous Hydroponic Powerplant Monitoring Robot to address the limitations of traditional systems. This robot uses IR sensors for line-following navigation, enabling it to autonomously traverse the hydroponic setup and monitor critical parameters like temperature, humidity, and soil moisture using integrated sensors. An ultrasonic sensor detects obstacles in its path, halting the robot, while an ESP32-CAM captures images to identify objects and display results on a web interface via Firebase. The system is powered by a 12V battery and includes IoT integration for real-time cloud updates, allowing remote monitoring and data analysis. Unlike static sensor installations, this mobile robot offers comprehensive coverage of the hydroponic system, ensuring timely detection of anomalies and efficient maintenance. By automating navigation, data collection, and obstacle handling, the proposed solution reduces manual labor, enhances monitoring accuracy, and provides a scalable, sustainable approach to optimizing hydroponic farming operations.







Reviews
There are no reviews yet.